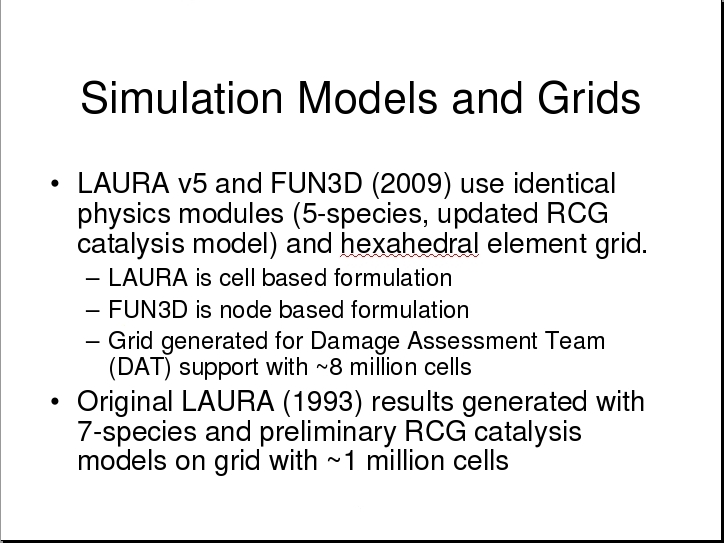
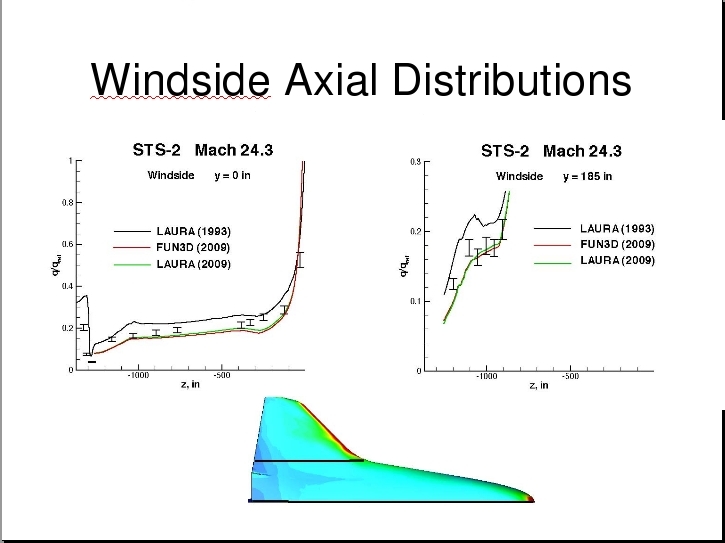
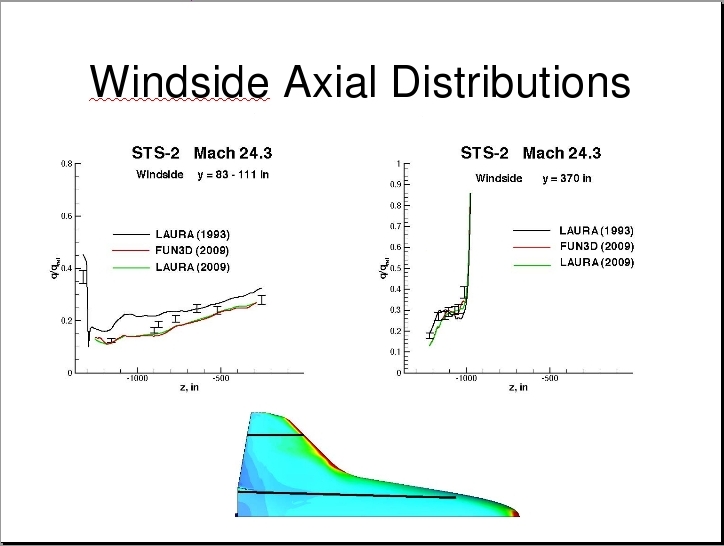
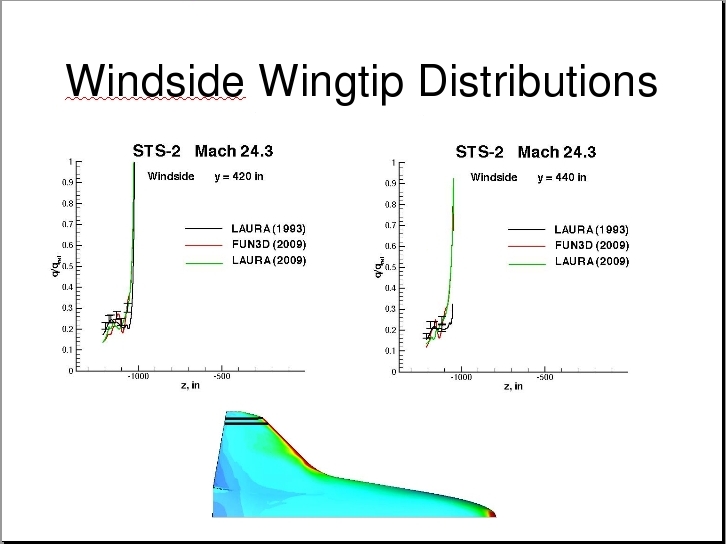
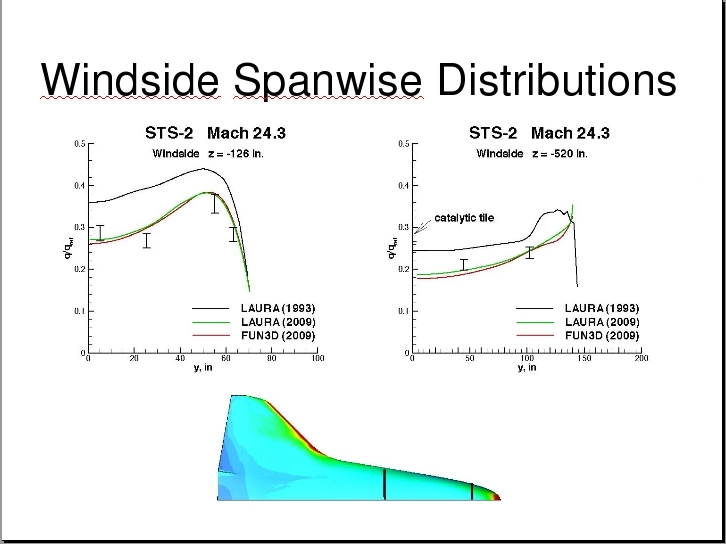
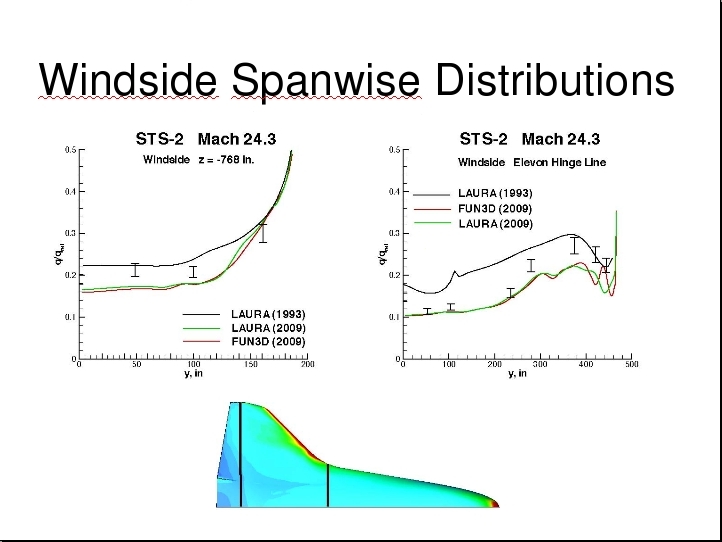
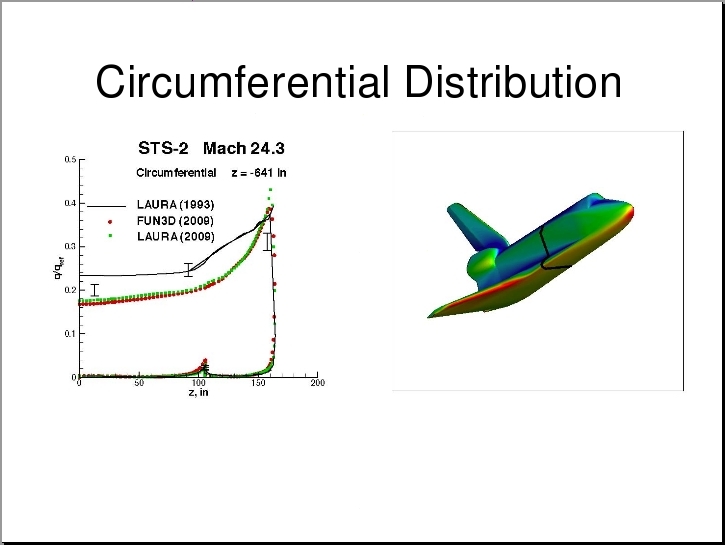
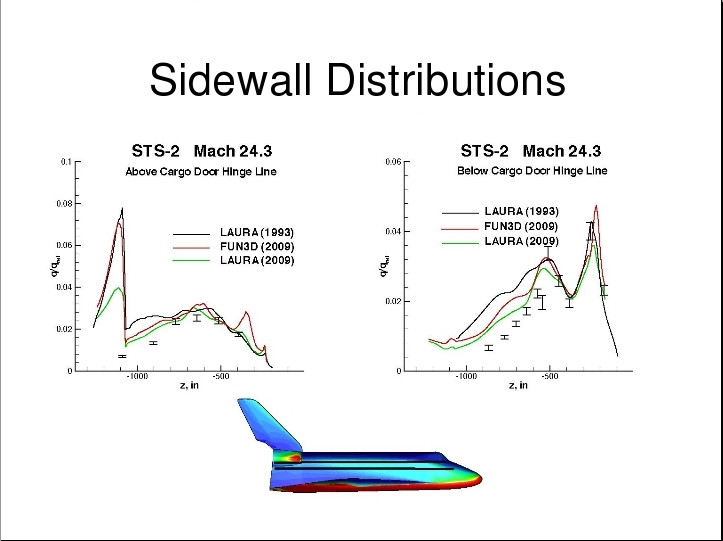
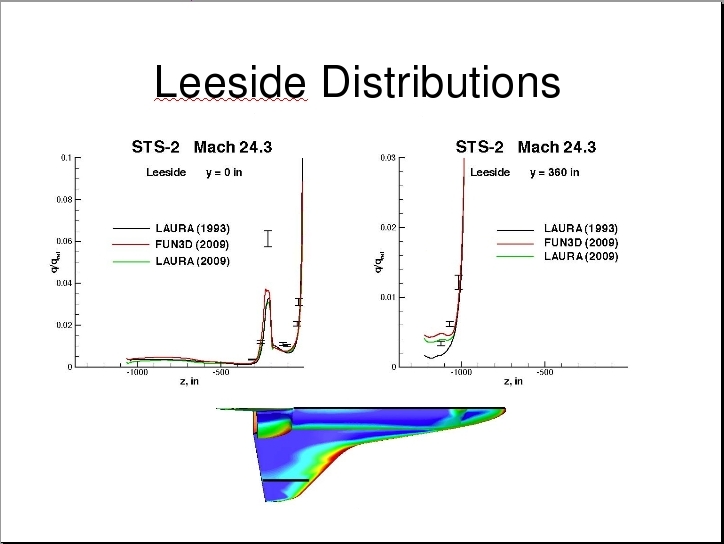
Application #25. FUN3D and LAURA v5 STS-2 heating comparisons
Contributed by Peter Gnoffo
NASA Official: David P. Lockard
Contact: FUN3D-support@lists.nasa.gov
Page Last Modified: 2026-05-07 14:59:16 -0400
NASA Privacy Statement
Accessibility
This material is declared a work of the U.S. Government and is not subject to copyright protection in the United States.